





2025年7月23日,科技部公布《驾驶自动化技术研发伦理指引》[1](以下简称《指引》),标志着国内人工智能伦理规范从一般原则走入驾驶自动化场景的专项规则构建。《指引》作为部门规范性文件,虽理论上仅具指导、倡导之效力,但仍有望为企业研发提供伦理准则,引导行业自律,更为未来制定更高层级的自动驾驶法律法规提供伦理基础和参考框架。[2]
围绕自动驾驶伦理的讨论,一个核心问题在于自动驾驶系统应当遵循何种价值原则,以及这些原则又应如何弥补法律和现有社会规范的空白,并进一步通过嵌入政策、制度、标准、研发流程与测试机制,转化为可验证、可审查、可追责的技术路径,建构保护道路使用之各方利益、规范自动驾驶技术发展与应用的规则体系。
本文在对《指引》内容讨论的基础上,对目前自动驾驶伦理领域的主要挑战和问题进行梳理,同时结合域外经验,分析伦理规则在自动驾驶产品治理中的实践路径,进而对企业产品设计与研发提出建议。
一、伦理规则与自动驾驶
自动驾驶或辅助驾驶(以下合称“自动驾驶”)的伦理困境较早可追溯于道德哲学领域的“电车难题[3]”思想实验:当一个人和五个人同时各被困在两条轨道上,电车冲入轨道会造成一人伤亡或者五个人的伤亡时,扳道工面临选择的难题,即应该把电车轨道扳到只有一个人被困的轨道,还是五个人被困的轨道?
类似的,当自动驾驶系统不得不在两难困境中做出选择,例如为避免碰撞事故而转向隔离带后致使乘车人员受伤或者转方向撞向路边行人时,伦理难题继续存在。当“扳道工”式的决策被转交由自动驾驶程序完成时,一个随之产生的问题是:如何确保机器决策机制能够依据既定价值规则,对不同因素进行权衡,并在必要情况下作出符合社会期待的判断。
人们也在思考,如果赋予一个程序这样的决策权力,是否实际等于将相应的选择权、价值判断赋予了自动驾驶程序的开发人、部署者或车辆生产厂家?对于该赋权,是否需要从外部法律的层面进行规制呢?
(一)自动驾驶技术与交通规则
自动驾驶技术的开发首先需要将相关道路规则体系纳入自动驾驶的“决策—执行”过程。美国联邦高速公路管理局在2021年公布了一个交通规则的数据框架原型[4],供自动驾驶各相关方自主开发相应的技术规程,期望能够在相应的基础设施所有人、自动驾驶技术开发方和技术提供方之间实现标准的统一。对交通规则数据的读取、处理,已经是自动驾驶技术研发的重要一环。[5]在技术测试方面,相应的交通规则数据也成为自动驾驶技术的合规性验证的重要参照依据。[6]
传统自动驾驶技术的开发,无论是交通规则、安全要求,还是伦理原则,通常都需要在较大程度上被转写为功能模块、行为约束和验证项,并通过测试、标定和审查进入产品体系。很多国家伦理规则的讨论,以及后续围绕风险接受准则、汽车轨迹规划、最小风险状态和验证框架的讨论,大体都建立在这一思路之上。
但是,近期智能驾驶正在从显式规则和模块化逻辑,逐步转向数据驱动、模型驱动的“端到端”技术路径(参见表一)。随着感知、理解、预测和动作判断越来越多地依赖多模态大规模数据训练和模型内部表示,系统行为的形成机制也随之变化。系统输出不再总能被还原为工程师预先写入的确定性规则,而更多体现为多模态大语言模型在训练后生成的策略结果[7]。区别于原有基于规则的技术逻辑,“端对端”的技术借助大模型的学习能力,能够较好解决自动驾驶处理复杂环境状况的灵活度和效率,但也带来了更多的驾驶安全、数据安全、责任划分等治理问题。
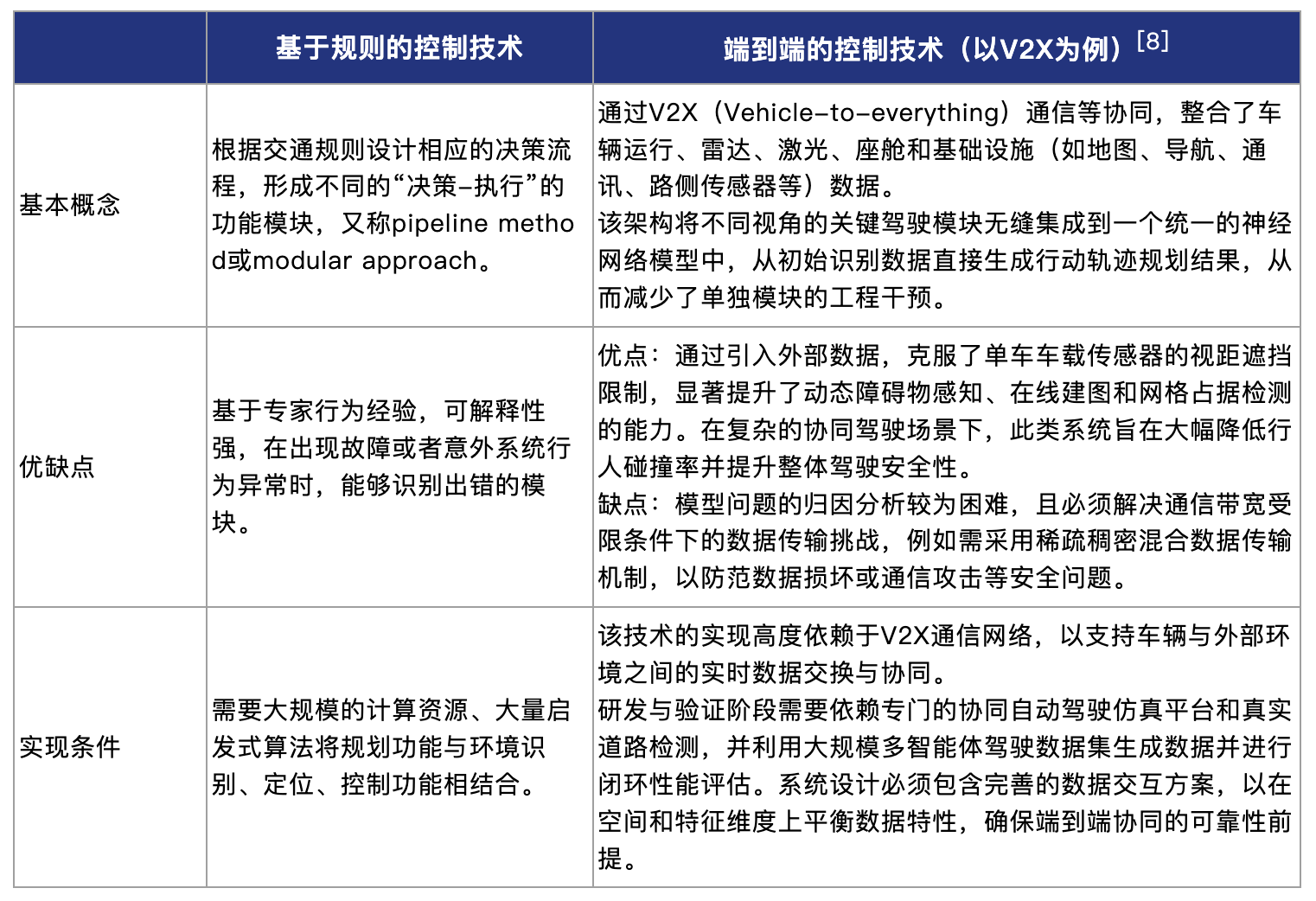
表一:基于规则的自动驾驶技术与端到端技术对比
(二)自动驾驶的伦理规制
然而,交通法规对于技术和算法程序开发而言,过于概括,对于代码开发的要求而言,颗粒度往往不够精细。为传统人类驾驶汽车而设计的道路交通法规并不能自然地适用于机器和算法语言。[9]
例如,在“会车”、“超车”等场景中,交通规则往往概况要求驾驶人员需要考虑车速、车辆之间的距离等因素,避免发生碰撞事故或对行人、非机动车辆造成影响。但是,多数要求都是原则性的,例如“安全超车”、“视野清晰”、“考虑道路和交通状况”等要求。在实际自动驾驶功能的开发中,相关车速、车距、行人、障碍物的识别和判断,都需要量化的计算。在无法避免发生碰撞的情况下,实际驾驶人可以考虑要突破现有的交通规则,如跨越实线,这些灵活性的驾驶要求,往往难以通过既定规则被写入代码。因此,伦理规范的重要作用之一,在于填补一般性交通规则在算法开发层面的空白,并为自动驾驶技术的设计、训练与验证提供更具可操作性的价值依据。
二、中国实践的探索
(一)人工智能伦理规则的专项化
科技部2025年公布的《指引》,由国家科技伦理委员会人工智能伦理分委员会制定。其重要意义在于伦理规范的适用被明确引入驾驶自动化这一高风险应用场景,针对不同自动化阶段、不同责任结构和不同产品形态提出了更具操作性的伦理要求。
从规范定位上看,该文件明确了在自动驾驶研发、测试、部署和应用过程中如何防范科技伦理风险、如何处理不同主体之间的责任关系、如何保障生命安全、技术公平与公众知情等问题,为责任主体、研发记录、行为一致性与责任追溯等制度的规范提供了规则性的依据。
(二)基本原则与一般要求
《指引》首先确立了四项基本原则:以人为本、增进福祉;安全优先、尊重生命;公平公正、避免偏见;知情保障、信息公开。这四项原则构成了整份文件的价值基础,同时也为后续针对不同自动化阶段提出的具体要求提供了判断标准。
第一,以人为本、增进福祉要求驾驶自动化技术研发坚持以人为本的发展思想,体现人文关怀,并服务于经济发展、社会进步、民生改善、交通效率提升以及生态环境的可持续发展。自动驾驶技术被置于广义的社会公共利益框架中加以考量。
第二,安全优先、尊重生命是整份文件中最核心的伦理要求之一。文件明确指出,驾驶自动化技术的研发和应用必须充分考虑安全性,既要尽最大可能保障用户及交通参与者的生命安全,要高度重视车辆周围人员生命与环境安全;在不可避免的交通事故或极端行车环境中,系统应当积极寻求有效方法,最大限度减少对人的伤害。这一表述意味着,自动驾驶系统的安全目标不应局限于车内乘员,而必须回应更广泛的道路环境与交通参与者安全需求。
第三,公平公正、避免偏见要求系统在正常运行和紧急情形下的决策不受年龄、性别、种族、身体特征、社会地位、财富水平或城乡背景等人类个体属性影响。文件还特别提出,应避免单一技术路线或单一技术主体形成技术垄断,防止驾驶自动化系统成为部分群体道德观念的表达载体,造成对其他群体的不公正对待。这一要求不仅指向算法输出层面的公平问题,也触及技术路线、产业结构与价值嵌入等设计层面的要求。
第四,知情保障、信息公开的要求强调,算法、模型等关键内容应当被清晰记录、随时可查;与驾驶自动化功能相关的重要数据应当被安全记录并妥善保存,以保障利益相关方的知情权。对于新的、可能具有争议的技术,应充分讨论并广泛听取利益相关方与公众意见。
除上述基本原则外,文件还提出了若干一般要求,包括合法合规、效益提升、控制风险、及时调整、隐私保护等内容。从整体上看,中国指引已经将自动驾驶伦理与公共安全、责任追溯、信息公开、数据治理、隐私保护和社会效益等多个相关既有制度维度系统地联系在一起。
(三)分级要求
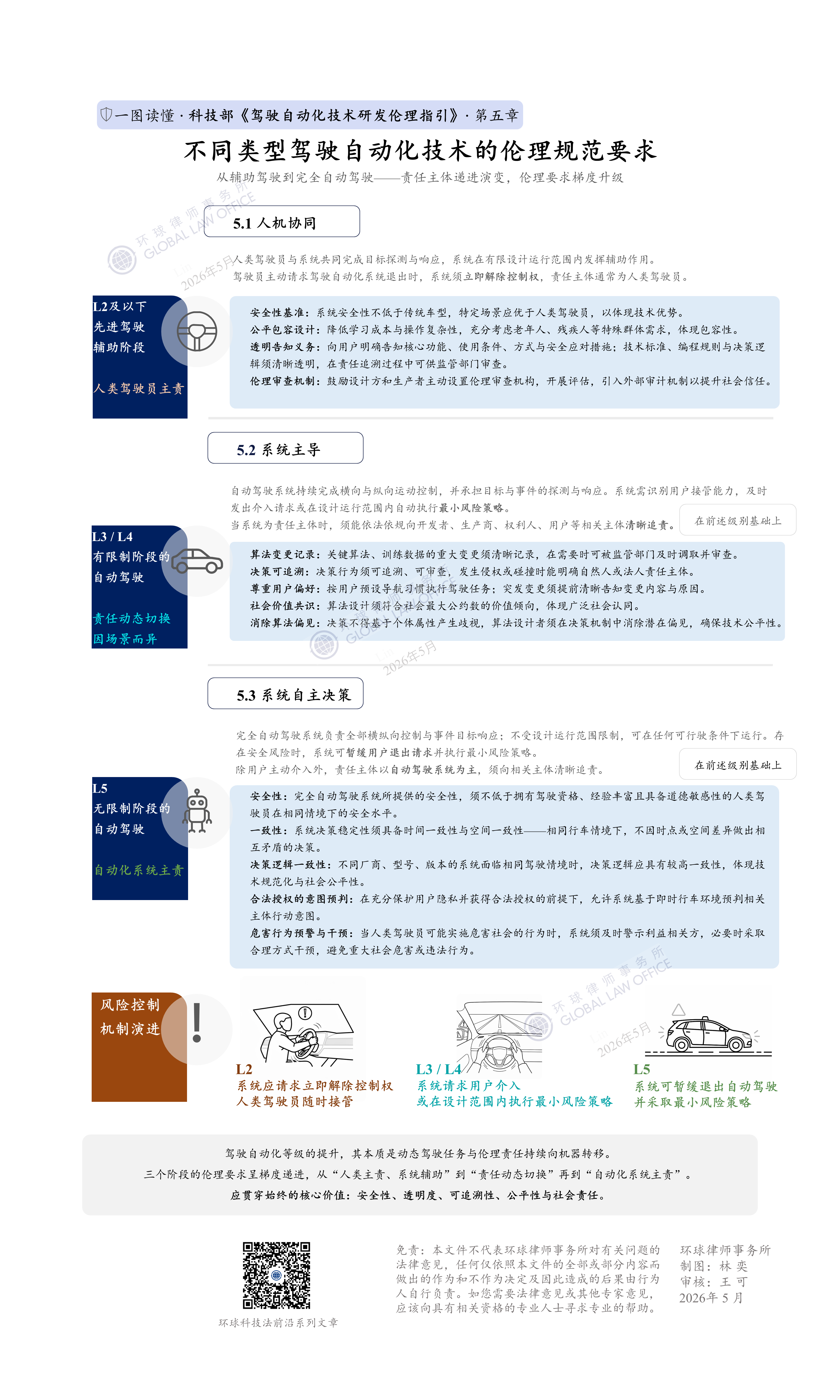
中国指引的一个突出特点是根据驾驶自动化程度及责任结构差异,对不同阶段的自动驾驶技术,提出了有区别的伦理规范要求。这种分级思路与自动驾驶技术自身的制度特征相契合,也使伦理规则更接近实际的产品研发和应用。
在先进驾驶辅助阶段(L2及以下),系统应能够提供不低于传统有人驾驶汽车的安全性,并在特定场景中优于人类驾驶员;同时,系统设计应降低用户学习成本、操作复杂性和经济负担,充分考虑老年人、残疾人等特殊群体需求;功能、使用条件、使用方式和安全应对措施应向用户清晰告知;系统遵循的技术标准、编程规则和决策逻辑应保持透明,并可供监管部门按需审查。
在有限制阶段的自动驾驶(L3、L4),自动驾驶系统已能够持续完成车辆横向与纵向控制并承担目标与事件探测响应,责任结构开始明显变化。文件明确提出:影响自动驾驶系统功能的关键算法、训练数据等内容的重大变更应被清晰记录,并在需要时可供监管部门调取和审查;自动驾驶决策行为应可追溯、可审查,以便在发生侵权、碰撞或其他违法行为时追索责任主体;系统应按照用户预设的导航习惯、行程和路径偏好执行全部动态驾驶任务,如因突发情况变更策略,应提前说明变更内容和原因;自动驾驶算法应符合“社会最大公约数”的价值倾向,并消除潜在偏见,确保技术公平性。
在无限制阶段的自动驾驶(L5),系统被设定为在任何可行驶条件下均能持续执行全部动态驾驶任务并自动执行最小风险策略,责任主体进一步向系统侧倾斜。指引在这一阶段提出的要求更加严格:首先,完全自动驾驶系统的安全性不应低于“拥有驾驶资格、驾驶经验丰富且具备道德敏感性的人类驾驶员”在相同情境下所能达到的水平;其次,系统决策应具有稳定性,即在相同行车情境下保持时间一致性和空间一致性;再次,在遵守法律法规和技术标准前提下,不同厂商、型号、版本的自动驾驶系统在相同驾驶情境下,其决策逻辑应具有较高一致性,以体现技术规范化与社会公平性。文件同时提出,在保护隐私并获得合法授权的前提下,系统可以基于即时环境预判相关主体行动意图;在发现人类驾驶员可能实施危害社会的行为时,系统应及时发出警示,并在必要时采取合理干预。
中国指引广泛借鉴了各国的先进治理思想和经验,显示该领域的治理重点正在从原则宣示转向产品治理与模型治理,深入到系统设计、决策审查、责任追溯与透明化等关键要求。指引中多数规则性表达仍需要通过行业实践落地并通过适用的立法程序获得更高级别的效力层级和约束力。在产品设计、技术开发、技术验证、产品投放和消费者反馈等阶段,需要将规则或者伦理要求进行结合,有效回应社会公众和监管部门的关注。
三、德国自动驾驶规则:从伦理到立法
在自动驾驶领域,德国较早开启了从伦理规则到制度安排、再到产品要求的转化实践。该过程的一项鲜明特征,在于其制度形成路径首先就由伦理规则奠定制度基础,再由立法予以承接。
(一)德国的制度起点
2017年,由德国联邦交通与数字基础设施部召集设立的自动驾驶伦理委员会发布《自动驾驶与网联驾驶伦理准则》(Ethical rules for automated and connected vehicular traffic),系统提出20条伦理指南[10]。该委员会(以下简称“德国伦理委员会”)并非立法机关,而是一个面向政府决策的跨学科咨询机构,其成员来自法学、伦理学、工程技术、汽车产业、消费者保护、宗教界和司法界等不同领域。其设立目的正在于,在自动驾驶逐步进入公共道路之前,先就其涉及的生命保护、责任分配、数据治理与社会可接受性等问题提出基础性规范框架。
2021年,德国《自动驾驶法》将其中若干关键原则纳入正式法律框架。因此,德国自动驾驶治理从一开始便不只是围绕道路测试、交通准入或产品许可展开,而是首先回答自动驾驶技术应当在何种规范边界内发展的问题。
(二)核心规则
2017年德国伦理委员会最重要的贡献,在于在自动驾驶领域较早确立了一组核心要求。
第一,自动驾驶系统的首要目标是提升所有道路使用者的安全。这一表述意味着,自动驾驶产品不能仅以驾乘人员利益为中心进行优化,而必须以更广义的公共道路安全为出发点。
第二,自动驾驶只有在相较人类驾驶能够减少损害时,才具有伦理正当性。换言之,自动驾驶的可接受性自始即被建立在“更安全”这一前提上。
第三,系统应尽可能通过防御性、预见性设计,避免形成危险情境和两难情境。该要求尤为关键,因为它意味着自动驾驶伦理的重心不只在事故最后一刻的选择,而在于通过设计将风险控制前移。
第四,在不可避免冲突中,人命高于财产和动物。这是德国伦理规则中最明确、也最具象征性的法益排序。
第五,系统不得基于个人特征进行歧视性区分。该要求后来被德国 2021 年自动驾驶法正式吸收。
第六,责任将随着自动化程度提高而发生转移,原先主要由驾驶员承担的责任,将逐步转向制造商、系统运营者以及相关制度与基础设施的责任主体。自动驾驶从一开始就不仅是控制问题,同时也是治理问题。
综合来看,该指南并未试图为所有极端事故提供一个数学化的统一解,而是通过上述规则,确立了一套相对稳定的制度边界:自动驾驶必须更安全,必须尊重人的生命,必须避免歧视,并且必须能够追责。
(三)伦理规范法律化
2021年德国《自动驾驶法》在2017年德国伦理委员会报告的基础上,对若干关键原则进行了法律化表达。
从制度内容上看,德国法首先吸收了该委员会关于减少事故与损害的基本立场。该法围绕事故预防、损害减轻以及系统在风险场景下的行为要求,对自动驾驶系统设置了明确的制度性约束。
其次,在不同法益冲突中,法律明确提出人命保护具有最高优先级。这一规定与伦理委员会“人命优先”的基本立场保持一致。
再次,在不可避免的人命危险中,法律要求不得基于个人特征进一步权衡。这将伦理委员会确立的非歧视要求正式转写为法律约束。
此外,法律还通过风险最小化状态等制度安排,要求自动驾驶系统在无法继续完成行程或遭遇异常时,主动进入风险最低的运行状态。这表明,德国法已经不再只是讨论事故结果,而开始要求系统在运行逻辑中主动承担最小化风险的任务。
(四)德国经验的思考
1. 伦理规则的意义所在
从形式上看,德国2021年《自动驾驶法》已经将自动驾驶涉及的若干核心原则写入成文法,似乎意味着伦理规则已完成其“先导性”使命。但若进一步考察德国立法后的学术与制度讨论便会发现,事实并非如此。“人命保护具有最高优先级”“不得基于个人特征进一步权衡筛选”等表述,确实划定了重要的制度边界,但这些边界并不能自动回答更具体的问题。[11]自动驾驶法的出台促使伦理问题以更具体、更技术化的方式重新出现。[12]
例如,在对德国伦理委员会的第二项建议,“相较人类驾驶能够减少损害”,的解释中,一些学者提出的合规框架要求包括了多个层次的风险和收益分析,其中包括企业需要能够在实证证据支持下证明该减少,并能够说明该结果是如何实现的。为了能够达到保证社会和监管机构信服之目的,该合规框架要求企业从产品设计到正式发布的过程始终贯彻相应的“风险平衡”机制,充分考虑多个关键因素:“社会公众对新技术及应用的透明化要求;在自动驾驶系统的审批过程中存在的未知因素;结合定量和定性的方法;事故造成的财产损失不应被纳入框架的考量;风险平衡决策的复杂度”。[13]
自动驾驶规则的真正难点,在于从“有无原则”转向“原则如何进入产品”。由人的主观决策判断转换为数字规则的判断总会引发“失控”的担忧。只要这一转换环节存在,伦理规则就不会失去意义。相反,它会持续承担解释原则、连接制度与产品、约束企业技术选择的功能。也正是在这一意义上,德国立法的重要意义在于其并没有终结伦理讨论,而是在承继伦理内涵的基础上将其推进到实践层面。
2. 从“撞谁”到“如何控制风险”的真正转向
在公共政策的讨论中,一旦事故不可避免,车辆究竟应当保护谁、牺牲谁,似乎构成了全部问题的核心。然而,德国经验的重要性恰恰在于它较早突破了这一问题设定。
无论是2017年德国伦理委员会的报告,还是该国2021年自动驾驶法,都没有将“事故最后一秒如何在若干生命之间作选择”当作制度设计的中心任务。这并不是为了回避极端事故,而是在于重新界定自动驾驶伦理的重心,将产品设计、运行与验证全过程的风险治理问题予以突出明确。
德国规则特别重视如何通过防御性、预见性的设计避免危险情境和两难情境的形成。[14]而当问题从“可以撞谁”的选择转向“如何控制风险”,产品设计和规则制定的重心也随之发生变化。速度、间距、会车、让行、并线、最小风险状态等逻辑因素,都会进入自动驾驶伦理的考察范围。自动驾驶系统成为持续识别风险环境、持续分配风险的行动系统。
这一实践也反映在了近年来自动驾驶领域的国际标准中,很多安全控制措施和技术被固化为风险管理的标准。例如,2025年发布的ISO TS 5083将自动驾驶的安全战略、安全设计、验证与部署后运行纳入统一结构,并将ODD[15]、DDT fallback[16]、最小风险状态[17]和风险接受准则[18]等管控实践转化为标准化、工程化的风险管理框架。
3. 弱势道路使用者保护与风险分配正义
德国伦理委员会较早提出,自动驾驶应尽可能降低对弱势道路使用者的风险。自动驾驶的轨迹决策过程本身就是在分配风险:目标车速如何设定,车辆在车道中的横向位置如何选择,是否给大车留出更大安全余量,是否对行人和骑行者赋予更高保护权重,都会直接影响不同类型的交通参与者在公共道路上所承担的风险。换言之,自动驾驶系统在对风险进行识别和分析的过程中,也在主动地塑造道路交通风险格局。[19]
在公共道路环境中,行人、非机动车和其他车外第三人往往处于更弱势的位置。弱势交通参与者保护是德国自动驾驶伦理规则的一项基本要求。自动驾驶作为一个持续控制车辆并影响风险的系统,必须根据该要求,避免将更多风险压给那些在质量、速度、尤其是防护能力上更弱的参与方。
四、结语:对中国自动驾驶伦理规制的启示
自动驾驶产品的差异固然会体现在车载算力规模、感知精度、驾驶场景覆盖和驾乘功能体验等层面,但这些指标并不足以完整评价一套系统的成熟度。随着自动驾驶伦理规则进入产品设计和开发,如何定义风险、如何设定最小风险策略、如何保护弱势道路使用者、如何保持不同场景中的决策稳定性与一致性,正在成为产品能力的关键组成。
企业在该领域的风险控制、行为边界和责任安排上形成稳定、清晰、可验证的管理控制能力将直接决定其产品竞争力。
(一)智能驾驶开发应将伦理规范纳入产品的设计和开发
交通规则所要求的行为规范和道德准则往往无法在文字、代码层面得到彻底的落实。智能驾驶的开发需要将相应的规范纳入企业产品开发和经营管理的流程中。一些基本、重要的规则应该在产品设计之初、企业规划和愿景中尽早贯彻,形成合规实践,并通过工作流程和记录的方式,形成合规证明留痕。在对规则进行深入解读的基础上,工作流程的设计、梳理和完善既是业务要求,也是企业防范和化解法律风险的基本手段。
当然,这一过程的实际操作面临着很多困难,特别是在大语言模式广泛使用的当下。神经网络计算使用的数据训练、机器学习的方式造成可解释性的困难,同样也使得对这些模型或算法是否遵守相关法规和伦理规则的评估面临巨大的挑战。目前在不断探索中的自动驾驶技术及其测试标准往往由厂商和测试机构共同制定。测试机构应对自动驾驶技术遵守法规和伦理的情况,包括相应的测试工具和手段,进行同样的探索和实践。
(二)自动驾驶决策“可追溯”、“可审查”要求的落地
德国、中国的伦理指引都有相似的要求,自动驾驶的决策行为应当可追溯、可审查,以便在发生侵权、碰撞或其他违法行为时,能够通过追溯算法内容明确相关的责任主体。
这不仅要求技术的标准、编程规则和决策逻辑需保持清晰透明,也要求自动驾驶系统的开发者或生产商能够清晰证明,相应算法的逻辑和功能在设计阶段就贯彻相关要求,并能够经过有效性和可靠性的检验。相关伦理和法规的要求也会被拆解融合到汽车测试标准和实践中,被定量化的数据验证。
大模型推理的“黑箱”过程,大大增加了逻辑验证的难度,也使得“可审查”的要求面临巨大挑战。然而,现有技术的发展并非毫无对策[20]。我们相信中国自动驾驶行业将能够借助科技的力量,推动相关技术标准获得监管部门和公众的认可。
(三)自动驾驶技术“公平性”要求的落地
中国指引要求,应确保在驾驶自动化系统的正常运行过程中或在面临紧急情况时,系统决策不受人类个体属性和特征(如年龄、性别、种族、身体特征、社会地位、财富水平或城乡背景等)的影响。任何基于个体属性的差异化决策表现出的歧视与偏见均属伦理不可接受范围。尤其在涉及非机动车或行人的安全时,该规则要求自动驾驶系统不应基于个体属性,对不同主体造成差异化的影响。
德国伦理委员会认为,为了达到该项要求,自动驾驶的程序在计算对象可能遭遇的风险时,不能考虑任何个人特征,特别要忽略其是否是自动驾驶的乘员。在将风险降低到最低水平后,即使自动驾驶系统需要考虑可能牺牲其他人的利益,人作为分析对象的各种特征因素不应被纳入该风险的分配计算。
无论在智能汽车的测试还是事故后的调查中,公平原则的遵守与否将成为一个算法评估或审计的专业问题。企业应考虑从一开始就将相应的伦理规范要求纳入设计的考虑,并在后期的产品测试予以关注。伦理规则最终仍需通过产品治理、内部流程与交易安排予以落实。
(四)企业应在交易文件中清晰界定自身在产业链中的义务和责任
自动驾驶系统通常由环境感知、路线规划、车辆控制、地图调用、仿真环境、云端通讯和数据闭环等多个环节共同构成,且这些环节往往分布于不同主体之间。在这种分工格局下,自动驾驶伦理规则的落实,已经不可能仅由整车厂单独承担。只要涉及算法变更、模型训练、决策输出、系统更新和责任追溯,规则就必须在产业链内部获得有效分配,而不能在模块分工中失真、弱化或悬空。
这要求企业在交易中清晰界定各自的义务范围和责任边界。在委托加工、开发和设计协议中,对各自的产品需求、质量标准、数据使用和交易、人工智能治理责任等问题进行明确和必要的区分。在发生产品质量问题、事故,面对监管部门调查、事故责任分配、消费者投诉等事项时,能够有效地将自身义务和责任限定在一定范围内。
注释:
[1] 科技部网站 https://www.most.gov.cn/kjbgz/202507/t20250723_194243.html
[2] 正如全国政协委员谢文敏所指出的,我国目前"至今没有针对智能驾驶的国家层面基础性法律",地方立法如《北京市自动驾驶汽车条例》等"法律效力位阶低、适用范围有限",形成制度碎片化。该伦理指引正是在这一背景下出台的过渡性指导文件。(https://www.rmzxw.com.cn/c/2026-04-07/3896330.shtml)
[3] Philippa Foot, The Problem of Abortion and the Doctrine of the Double Effect, Oxford Review (1967) vol 5, Pp5-15.
[4] Federal Highway Administration, Collaborative research framework for automated driving system developers and infrastructure owners and operators, U.S. Department of Transportation (2021), Report FHWA-HOP21-012.
[5] 例如Han等学者在2025年的一篇论文中,将美国联邦统一车辆法案、加州车辆法案、洛杉矶县车辆法案和洛杉矶市车辆法案中的共通规则进行抽取,创建了一个基础交通规则数据库,为自动驾驶的路径选择算法提供法规框架。参见:Xu Han, Zhiwen Wu, Xin Xia and Jiaqi Ma, Traffic Regulation-aware Path Planning with Regulation Databases and Vision-Language Models, (2025) arXiv:2503.09024.
[6] Qingzhao Zhang, David Ke Hong, Ze Zhang, Qi Alfred Chen, Scott Mahlke, and Z. Morley Mao, A Systematic Framework to Identify Violations of Scenario-dependent Driving Rules in Autonomous Vehicle Software. Proc. ACM Meas. Anal. Comput. Syst. (2021) https://doi.org/10.1145/3460082; S. Teng et al., Motion Planning for Autonomous Driving: The State of the Art and Future Perspectives. in IEEE Transactions on Intelligent Vehicles (2023) vol. 8, no. 6, pp. 3692-3711, doi: 10.1109/TIV.2023.3274536.
[7] Chen et al., ROAD: Responsibility-Oriented Reward Design for Reinforcement Learning in Autonomous Driving, IEEE Robotics and Automation Letters (2026) vol.11, issue 6. DOI:10.1109/LRA.2026.3678458
[8] Yu et al., End-to-End Autonomous Driving through V2X Cooperation, (2024) https://arxiv.org/abs/2404.00717; Liu et al., Toward Collaborative Autonomous Driving: Simulation Platform and End-to-End System, (2025). arXiv:2404.09496v2
[9] Brodsky JS, Autonomous vehicle regulation: How an uncertain legal landscape may hit the brakes on self-driving cars. Berkeley Technol Law J (2016) 31(2):851–878.
[10] Christoph Luetge,The German Ethics Code for Automated and Connected Driving. Philosophy & Technology (2017) 30, 547–558. https://doi.org/10.1007/s13347-017-0284-0
[11] Leon René Sütfeld, Joshua Bronson & Lando Kirchmair, Automated Vehicle Regulation Needs to Speak to Code, not to Humans: Keeping Safety and Ethics in the Public Domain, Philosophy & Technology (2025) 38:15.
[12] Alexander Kriebitz1, Raphael Max1 & Christoph Lütge, The German Act on Autonomous Driving: Why Ethics Still Matters, Philosophy & Technology (2022) 35:29.
[13] Nina Kauffmann, Felix Fahrenkrog, Ludwig Drees, and Florian Raish, Positive Risk Balance: A Comprehensive Framework to Ensure Vehicle Safety, Ethics and Information Technology (2022) 24:15.
[14] Christoph Luetge, The German Ethics Code for Automated and Connected Driving, Philosophy & Technology (2017) 30:547-558.
[15] ODD(运行设计域)是指自动驾驶系统被专门设计为能够运行的具体条件范围,包括道路、交通、环境、地理和时间等条件。
[16] DDT fallback是指在系统失效、驶离运行设计域或者任务无法继续时,为使车辆转入较低风险状态而实施的动态驾驶任务补救机制。
[17] 最小风险状态是指车辆在执行上述补救后所达到的风险尽可能降低的状态,通常表现为稳定、停止且足以降低碰撞风险的状态。
[18] 风险接受准则是指判断自动驾驶系统残余风险是否达到可接受水平的预设标准,其贯穿系统设计、验证、部署和运行评估过程。
[19] Manuel Dietrich, Addressing inequal risk exposure in the development of automated vehicles, Ethics and Information Technology (2021) 23:727–738.
[20] 例如,一些学者提出在大模型推理中,可以使用可验证的小模型来实现验证程序。参见Gao et al., De-fine: Decomposing and Refining Visual Programs with Auto-Feedback, (2024) arXiv:2311.12890v3


